An adaptation method (formerly predominantly denoted by learning method) has been developed which enables a conventional industrial robot to accurately execute a programmed path in presence of dynamical effects and high speed. To do so, in addition to the standard feedback controller we provide an adaptive feedforward controller. After the adaption the latter is capable of transforming a desired trajectory to positional commands (set-points) for the standard robot controller. Thus an ideal robot in joint space is created. The adapted feedforward controller does not depend on a specific path. In contrast it can be used for paths which have to be executed only once. For recurrent paths the accuracy can even be increased. If couplings between the joints are significant, neural networks are provided in addition to independent joint controllers to represent the nonlinear part of the dynamics. 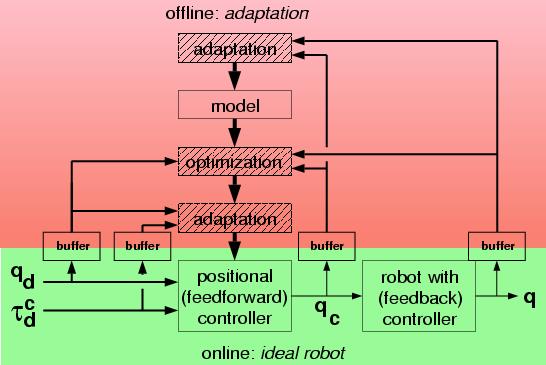
Improved path accuracy is caused by a three level structure estimating a simple process model, optimal a posteriori commands, and a suitable feedforward controller. See our video page for a video-clip of the motion executed for a typical adaptation process. Feedforward control, i.e. calculation of control actions as a function of subsequent sampled values of the desired trajectory is fundamental for path accuracy since dynamical delays cannot be cancelled by feedback. Like this, qualified controllers of high speed motion need more inputs than the current desired value which is fed to standard industrial controllers. In addition, since external forces acting on the robot have an influence on positional accuracy, we feed the desired forces into the feedforward controller. This is no force control but the compensation of the effect of the forces on the position. This method of adapted feedforward control has been implemented for a Manutec R2 running with the RCM3 industrial controller and for the industrial robot controller KUKA KRC1, reducing path errors of e.g. a KUKA KR6/1 robot. The mean path deviations are reduced to a factor of 20 for the Manutec R2 industrial robot. For low speed motion the adapted controllers' accuracy is in the range of the resolution of the positional encoders. After training with only two sample trajectories the adapted control system is applied to other totally different paths which are executed with high precision as well.  The right hand figure shows deviations from a straight path, a shift of 2 mm, and another straight path. The path errors come from the fact that for fast motion the different dynamical properties of the individual joints result in path deviations of the tool center point. The red curve shows the case with no compensation of dynamical effects. The green curve shows the improved path by using independently adapted feedforward controllers of the individual joints. The method is set up in joint space since there are substantial couplings between the Cartesian coordinates. So the adaptation algorithm primarily reduces the mean squared differences between the actual and the desired joint angles. Direct minimization of the more important maximal Cartesian deviations is possible with slight modifications of the algorithm. Hereby, the almost decoupled joint space models are used as well.  Reduction of the path deviations is limited by the accuracy of the positional measurements. This is a restriction in case of robots with joint elasticity. Nevertheless the method can be used if the real TCP position is available during adaptation. Application of the resulting controller to untrained paths or remote robots almost maintains the improvements of performance. The right hand figure displays the desired path (black) and the actual path using the standard controller (red). The green curve represents the performance reached by a feedforward controller which was trained at another robot. 
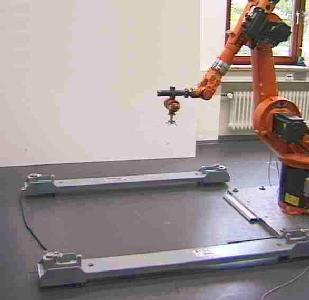
| With elastic robots we use a device of Dynalog Inc. which tracks the 3D position of the TCP by measuring the distance (cable length) to 4 fixed reference points. |
|
|
Static path errors are not considered. They are due to inaccurately known kinematic parameters, elastic deformation as a result of gravity, or because of a non nominal environment. The latter relates to a CAD-based planned path which is not appropriate for the real task. Because of the low bandwidth these effects are compensated with high performance by control using sensors. Such methods for sensor based control are based on this adapted controller for the robot position, too. As example our page on sensor based control shows force control problems as contour following. Deviations from the desired forces are transferred to positional deviations on joint level. The resulting path can then be controlled with high accuracy by an adapted positional feedforward controller (see video clips on force control.) In contrast to other control approaches our method is optimally designed for predictive sensors as video cameras. A typical application is visual servoing to track a visible contour with high speed (see video clips on vision based control.)
Back to the homepage of Friedrich Lange
 Publications: Publications:
Feel free to give comments or suggestions or to order papers in full resolution (sent by physical mail).  | F. Lange and G. Hirzinger, "Adaptive Minimization of the Maximal Path Deviations of Industrial Robots", European Control Conference ECC'99, Karlsruhe, Germany, August / September 1999 full version (270k) summary (60k) Abstract
A learning system is presented which uses feedforward control to improve the accuracy of standard position controlled robots. The method is executed on joint level since in this case there are less couplings than in the Cartesian space. On the other side the main goal is to reduce the maximal deviation from a given Cartesian path. This requires extended algorithms which are derived and examined using a KUKA KR6/1 industrial robot. The universal controller is adapted to minimize the maximal path error and then shows significantly better performance when repeating the training path or a similar trajectory. |
| F. Lange and G. Hirzinger, "Learning Accurate Path Control of Industrial Robots with Joint Elasticity", IEEE Int. Conference on Robotics and Automation ICRA'99, Detroit, Michigan, May 1999 ps.gz-version (150k) pdf-version (620k) Abstract
An adaptive architecture for feedforward control of industrial robots with standard positional controller is presented. This approach explicitly considers robots with elastic joints. It assumes that the real position of the TCP can be recorded for off-line evaluation. Compensation of elasticity is trained in a feedforward controller. Adaptation takes place without any knowledge of the physical system model. The performance of the method is demonstrated in experiments with a 6-axis industrial robot KUKA KR6/1 for which real path errors during full speed motion are reduced by 70 %. Reductions of 50 % can be expected for untrained paths or other robots of the same type. |
| F. Lange and G. Hirzinger, "Learning of a Controller for Non-Recurring fast Movements", Special issue on BEHAVIOR and LEARNING of the journal ADVANCED ROBOTICS, April 1996 ps.gz-version (370k) pdf-version (410k) Abstract
In this paper a learning method is described which enables a conventional industrial robot to accurately execute the teach-in path in presence of dynamical effects and high speed. After training the system is capable of generating positional commands that in combination with the standard robot controller lead the robot along the desired trajectory. The mean path deviations are reduced to a factor of 20 for our test configuration. For low speed motion the learned controllers' accuracy is in the range of the resolution of the positional encoders. The learned controller does not depend on specific trajectories. It acts as a general controller that can be used for non-recurring tasks as well as for sensor-based planned paths. For repetitive control tasks accuracy can be even increased. Such improvements are caused by a three level structure estimating a simple process model, optimal a posteriori commands, and a suitable feedforward controller, the latter including neural networks for the representation of nonlinear behavior. The learning system is demonstrated in experiments with a Manutec R2 industrial robot. After training with only two sample trajectories the learned control system is applied to other totally different paths which are executed with high precision as well. |
| F. Lange and G. Hirzinger, "Application of Multilayer Perceptrons to Decouple the Dynamical Behavior of Robot Links", Int. Conference on Artifical Neural Networks ICANN'95, Industrial Conference, Session 7, Paris, France, Oct. 1995 ps.gz-version (170k) pdf-version (590k) Abstract
The paper extends a previously proposed method for improving the path accuracy of robots. Especially during high speed movements nonlinear couplings between the joints deteriorate and degrade the robot's accuracy. Such couplings cannot be compensated by linear feedforward control. They require additionally a general function approximator as e. g. a multilayer perceptron. The learning system translates I/O data of robot movements to training data for the neural nets. Linear controllers and multilayer perceptrons are combined after training to improve the execution of sensor planned paths which are not explicitly trained before. The method is verified in experiments using a high speed path which originally is sensed by a compliant force- / torque sensor. |
| F. Lange and G. Hirzinger, "Learning to Improve the Path Accuracy of Position Controlled Robots", IEEE/RSJ/GI Int. Conference on Intelligent Robots and Systems IROS'94, München, Germany, Sept. 1994 ps.gz-version (1115k) pdf-version (1110k) Abstract
A learning method is presented which improves the dynamic accuracy of conventional industrial robots with integrated position control. The method is based on feedforward control being able to follow off-line programmed trajectories with high speed and negligible pose errors. For learning, the robot has to be moved along a given path. The algorithm then estimates a simple model. This model is used to build up a controller which is able to modify positional commands, thus reducing the positional path error from some millimeters to approximately 0.2 mm for a Manutec r2 robot. This improvement is valid also for other, non-trained trajectories. For repetitive control of a single path the error will be even less. Measurements of path accuracy are verified using data of a force/torque sensor during tracking a known contour. |
|