Rollin'Justin Catching Flying Balls
Description
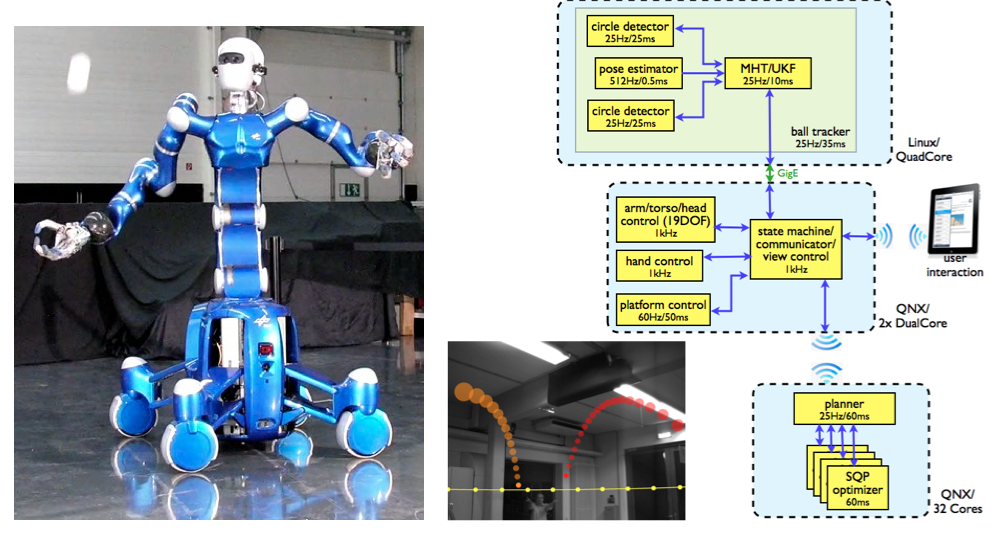
Catching a thrown ball with a hand is not easy neither for humans nor for robots. A tight interplay of fast perception, a good catching strategy, body control and dexterity is needed. Hence, ball catching is an excellent testbed for a number of robotic key technologies.
Headmounted HD stereocameras track the thrown balls. The rapid catching motion introduces vibrations to the system, which the control can not cancel completely. Therefore, a supporting inertial measurement unit is used for predicting the ball's trajectory.
During the flight the predictions continuously improve and a realtime path planner decides where, when, and in which configuration to kinematically optimal catch the ball. For this, a non- linear optimization problem (including simple collision avoidance) is repeatedly solved on an external computing cluster (32 cores).
The challenging system architecture with distributed sensors, actuators, and computing resources, communicating under hard realtime constraints, is implemented using DLR's component based aRD (agile robot development) software concept.
Videos
In the Media
2011
newsy
CBSNews.com, Reuters, Repubblica.it
spiegel.de, focus.de, stern.de
welt.de, zeit.de, handelsblatt.de, bild.de,
IEEE-Spectrum, Engadget, Gizmodo, news.discovery, Hizook, Golem, cnet, physorg, cntv.cn, 20minutes.fr, Computerworld
YouTube (on 11. of May 2011 in the charts: "#14 - Most Viewed (This Week) - Science & Technology" )
Newscientis (video of the week)
Wired (playbook)
the engineer
2010
Discovery Channel: Daily Planet
Sat.1 Bayern: Sondersendung 'Roboter'
BR: Abendschau und Rundschau
ARD: Mittagsmagazin
n-tv
Job Openings
We are always looking for PhD and Diploma/master students to work with us on this project. Topics are fast, highdimensional optimization, optimal control for complex dynamics, robot learning, parallel realtime computing (including clusters and GPGPU), ... Candidates must have a strong mathematical and/or programming background and come from fields like physics, computer science or engineering.
Contact
Berthold Bäuml
E-mail: berthold.baeuml(at)dlr.de
visual tracking in cooperation with
DFKI Safe and Secure Cognitive Systems