Sensor based control with different types of sensors is investigated for robots with a positional interface. This includes force control and visual servoing, where for the latter an extended approach is useful. Normally the difference between the actual and the desired sensor values is reduced by commanding a velocity which depends on the time history of the sensed control error. Typically a PD-controller is used. The controller parameters are manually tuned or automatically learned. For a new configuration the tuning or the learning has to be repeated since the controller parameters implicitly include the calibration of the sensor device and the bandwidth of the signal and the noise. Therefore a new architecture has been proposed which reduces sensor control to positional control. There are two reasons for this. First, most robots have a highly optimized positional control loop. Second, if adaptation or learning is necessary, it is sufficient to adapt a positional controller which is independent of sensor characteristics and therefore valid for a large number of sensor control tasks. Sensor control is then reduced to the calculation of the desired path. This can be done by adding the sensed deviations between actual and desired path to the actual position of the time instant of sensing. The prerequisites of this method are that the sensor has to be calibrated and that the time instant of sensing has to be known. The benefit is that a new sensor can be connected without any tuning. Even with big time-delays no oscillations can occur. After a single perception of the control error the robot will approach to the desired configuration showing the bandwidth of the positional control loop. Contour following experiments using a compliant force / torque sensor have been executed (see video clip). Compared to the usual PD-controller our approach corresponds to a state space controller that correctly accounts for the robot dynamics. Therefore if the robot dynamics and / or time delays of sensor processing are the bottleneck, our system is advantageous with respect to control issues. As well we have considered asynchronous sensor data or low sampling rates of the sensor or the sensor interface of the robot. Such features may result in a very poor behavior of a PD-controller. 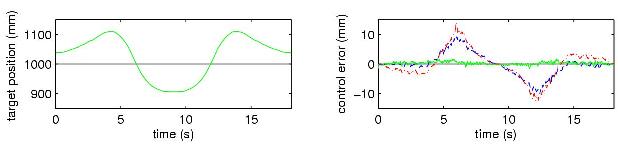 On the other hand our method (red line) does not process the history of the control errors and therefore - in case of continuously varying disturbances - may be inferior with respect to the PD-controller (blue line). The reason is that actually the positional level, the ideal robot, needs future desired joint positions. If only the current desired positions are available we have to expect control errors. Fortunately such errors can be minimized by extrapolating the desired path. Then the knowledge of the dynamical system and the task are implicitly fused to get an optimal control (green line). (see video clip). Another advantage of the method becomes apparent if the sensor provides more than the current control difference. This is true for a camera system. Evaluation of the whole image may result in sensor based modification of future time-steps of the desired path. This is outlined on our page on predictive sensor based control and allows accurate tracking at high speed.
Back to the homepage of Friedrich Lange
 Publications: Publications:
Feel free to give comments or suggestions or to order papers in full resolution (sent by physical mail).  | F. Lange and G. Hirzinger, "Stability Preserving Sensor-Based Control for Robots with Positional Interface", IEEE International Conference on Robots and Automation (ICRA2005), April 2005, Barcelona, Spain paper (6 pages, 490k) digest (1 page, 70k) related video clips Abstract
When industrial robot arms are controlled using sensor data the performance is dependent on the sensor sampling rate, on delays in signal processing, and on the robot dynamics. The paper presents an approach in which control is inherently stable as long as the time instant of sensing is known, independently of delays. In addition to sensor data the method uses the actual robot pose to compute a desired pose which is then controlled by the existing positional control loop. Updated sensor data affect the system as a refined target for positional control. So the positional control and the use of sensor data are decoupled. This is useful for the integration of a priori information on the task. The method is applicable especially for force control tasks as contour following and for visual servoing. |
| F. Lange and G. Hirzinger, "A Universal Sensor Control Architecture Considering Robot Dynamics", International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI2001), August 2001, Baden-Baden, Germany original version (6 pages, 180k) extended version (9 pages, 260k) related video clips Abstract
The paper presents a dynamical sensor control architecture that allows robot arms to perform tasks that with conventional feedback of sensor data fail because of delays or deviations due to the robot dynamics. The architecture distinguishes between robot positional control and refinement of desired positions using vision and / or other sensors. Each of these aspects is designed without the knowledge of the other. Communication between sensors and robot control may be slow and asynchronous. Experiments show vision based control along a seen line at a speed of 0.7 m/s. Path deviations are about 0.6 mm. |
| F. Lange and G. Hirzinger, "Sensorgeführte Roboter für industrielle Aufgaben", VDI/VDE Konferenz ROBOTIK 2000, Juni 2000, Berlin, Deutschland, VDI-Bericht Nr. 1552 (in German) original version (160k) extended version (260k) Abstract
The article shows that former problems with sensor based path planning and control methods have been solved. An architecture is presented which easily can be integrated into usual robot control devices. The method consists of several modules which allow the user at a reasonable price to apply sensors to improve the accuracy of given motion with respect to measurable invariants, even at high robot speed. The method allows the application of CAD-based planned paths without further teach-in. |
| F. Lange and G. Hirzinger, "Learning Force Control for Position Controlled Robots", IEEE Int. Conference on Robotics and Automation ICRA'96, Minneapolis, Minnesota, April 1996 ps.gz-version (160k) pdf-version (370k) Abstract
The paper applies a previously presented method for accurate tracking of paths to force control. This approach is very simple since it does not require a joint torque / motor current interface but only a positional interface. It can be applied with elastic end-effectors (sensors) as well as with stiff environments where most elasticity is in the robot joints. In both cases deviations from the desired forces are transfered to positional deviations on joint level. The resulting path can then be controlled with high accuracy by a learned feedforward controller including the influence of the forces. The approach can be applied to the sensing of a contour or to the tracking of a known contour with high speed. |
| F. Lange and G. Hirzinger, "Iterative Self-Improvement of Force Feedback Control in Contour Tracking", IEEE Int. Conference on Robotics and Automation ICRA'92, Nice, France, April 1992 ps.gz-version (1040k) pdf-version (1010k) Abstract
A very general 3 level learning method is presented, aiming at self-improvement of the parameters of a force feedback controller demonstrated in contour tracking tasks. It is assumed that no model is known a priori, neither of the robot nor of the contour to be tracked. The system identifies such a model, including information about its reliability. Model and estimated noise are used to generate optimal control actions for the sample trajectory. They are then used for estimation of the parameters of the controller. This controller then produces a new trajectory, which in turn may be optimized and trained thereafter. Kalman filter techniques are applied in all adaptation levels involved. Learning is possible off-line or on-line. Model and controller may be based on linear difference equations or include nonlinear mappings as associative or tabular memories or neural networks. It is shown, that even for a linear controller substantial improvements can be attained, the more as no assumptions are needed about the bandwidth. |
| F. Lange, A Learning Concept for Improving Robot Force Control, IFAC Symposium on Robot Control syroco'88, Karlsruhe, Germany, Oct. 1988 |
|