This page shows video clips of experiments presented at the IEEE Int. Conference on Robotics and Automation (ICRA2005) in Barcelona, Spain, 2005. At this conference two papers have been presented, one on sensor based control in general (paper: "Stability Preserving Sensor-Based Control for Robots with Positional Interface") and another one on predictive sensor based control using a robot mounted camera (paper: "Calibration and Synchronization of a Robot-Mounted Camera for Fast Sensor-Based Robot Motion"). In both papers a robot manipulator is controlled using on-line sensor data. We present our video clips in two versions, enabling a faster download and a continuous playback, or a better resolution including sound. In all cases we recommend to use the repeat option of the player to get a continuous film instead of a very short video sequence. Control Using Extrapolated Data of a Non-Predictive Sensor (explanation) This sections shows video clips of an experiment in which a camera is used, processing only data of the mean image row. This is to assess the abilities of non-predictive sensors as force sensors or cameras tracking randomly moving targets. 
| 
| time: 18 s
size: 900 kB | 
| 
| time: 18 s
size: 2000 kB |
Performance (note the different scales) (explanation)

Control Using a Camera as Predictive Sensor (explanation) This sections shows video clips of experiments in which a camera is used to control the robot along an unmoved cable. The tracking performance is improved by adaptation in 3 steps with the last step representing the application task. - Identification of the camera parameters by static images (explanation)
 | time: 42 s
size: 200 kB |  | time: 42 s
size: 800 kB |
- Identification of further parameters using a special test motion of the robot (explanation)

| 
| time: 4.6 s
size: 300 kB | 
| 
| time: 4.6 s
size: 700 kB |
- Identification of the remaining relevant parameters using the application task (explanation)

| 
| time: 5.2 s
size: 300 kB | 
| 
| time: 5.2 s
size: 800 kB |
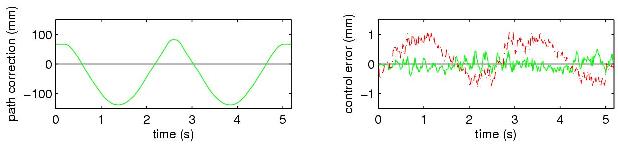
Performance (note the different scales) (explanation)
Back to the main video page. |