This page shows video clips of experiments presented at different events. These experiments use the approach presented on our page of predictive sensor based control using a robot mounted camera. In contrast to the other pages with video clips which display the tracking of continuous lines, we here show the tracking of a sequence of straight lines which are connected by vertices. The execution of the vertices by the robot requires a kind of impedance-based control. For papers on this topic see "Impedance Based Smoothing for Visual Servoing along Edges" or "Is Impedance-Based Control Suitable for Trajectory Smoothing?". We present our video clips in two versions, enabling a faster download and a continuous playback, or a better resolution including sound. In all cases we recommend to use the repeat option (STRG_T) of the player to get a continuous film instead of a very short video sequence. Details can be seen better using the slow motion option (STRG_SHIFT_S) or by pausing (STRG_P) the playback.

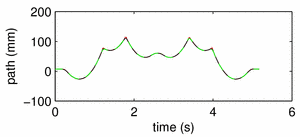
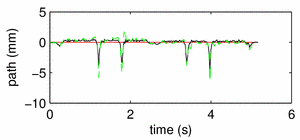
Performance (note the different scales) (explanation of the lines)
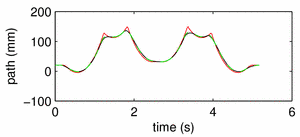 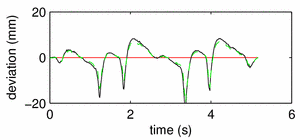  
Performance (note the different scales) (explanation of the lines)
 small video small video  normal video normal video  video 3 times slower video 3 times slower Performance (note the different scales) (explanation of the lines)
 normal video Back to the main video page. Back to the homepage of Friedrich Lange |